A different airspace-awareness problem than airports
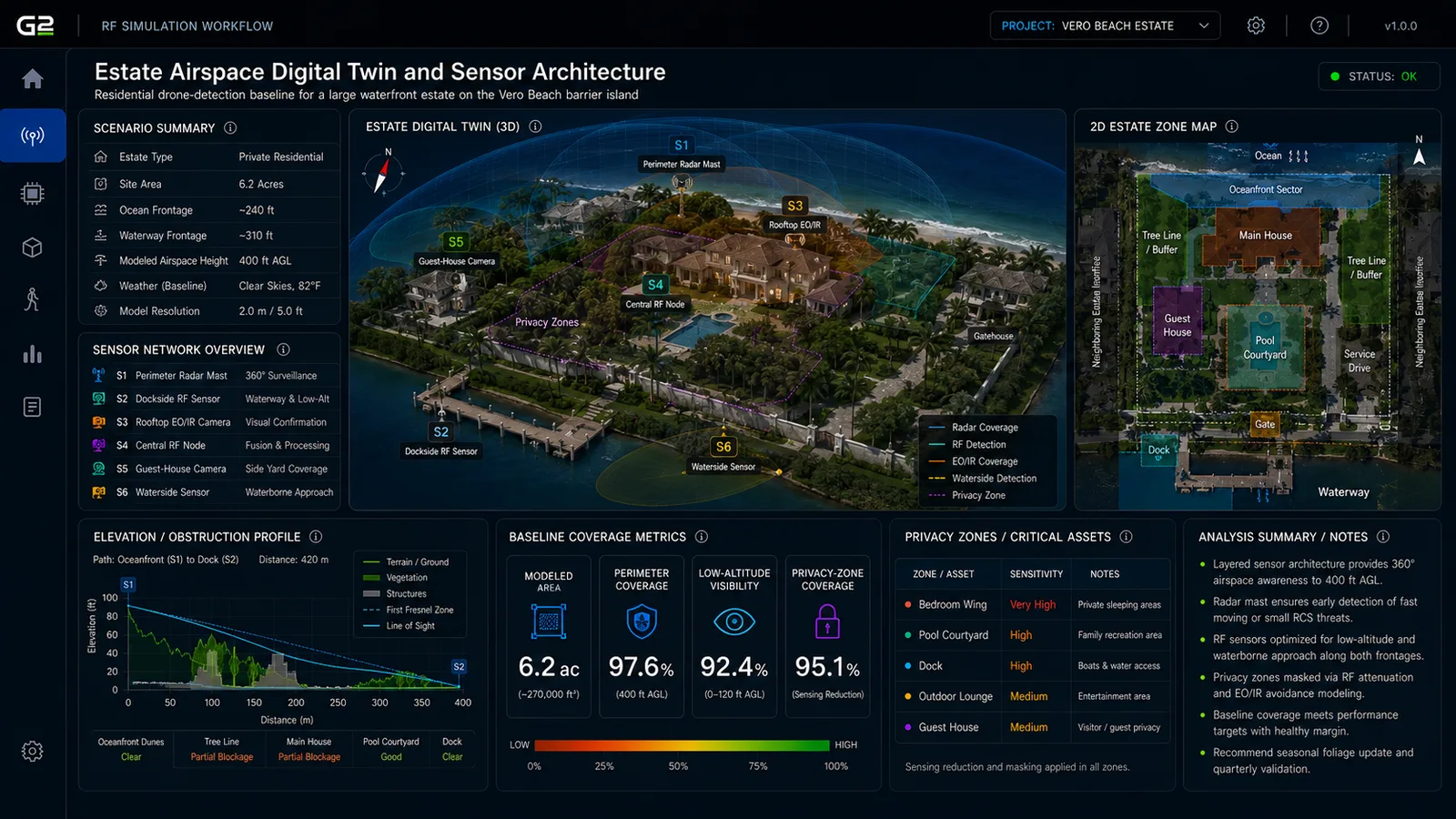
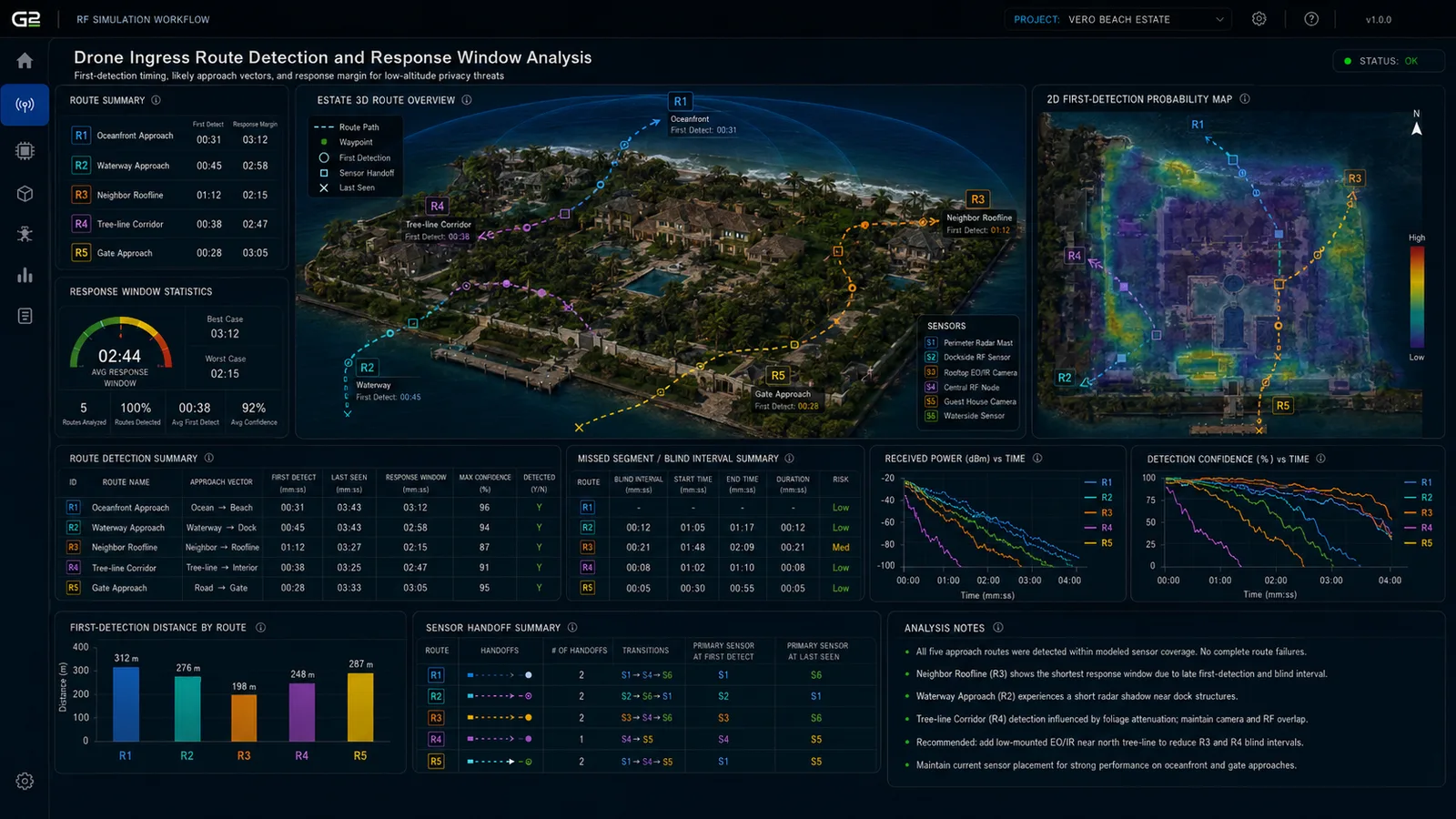
High-value residential estates face a different airspace-awareness problem than airports, industrial sites, or commercial campuses. The concern is not simply whether a drone can be seen somewhere over the property. The concern is whether the estate can detect, classify, track, and respond to low-altitude drone activity early enough to protect privacy, preserve situational awareness, and support an appropriate security response.
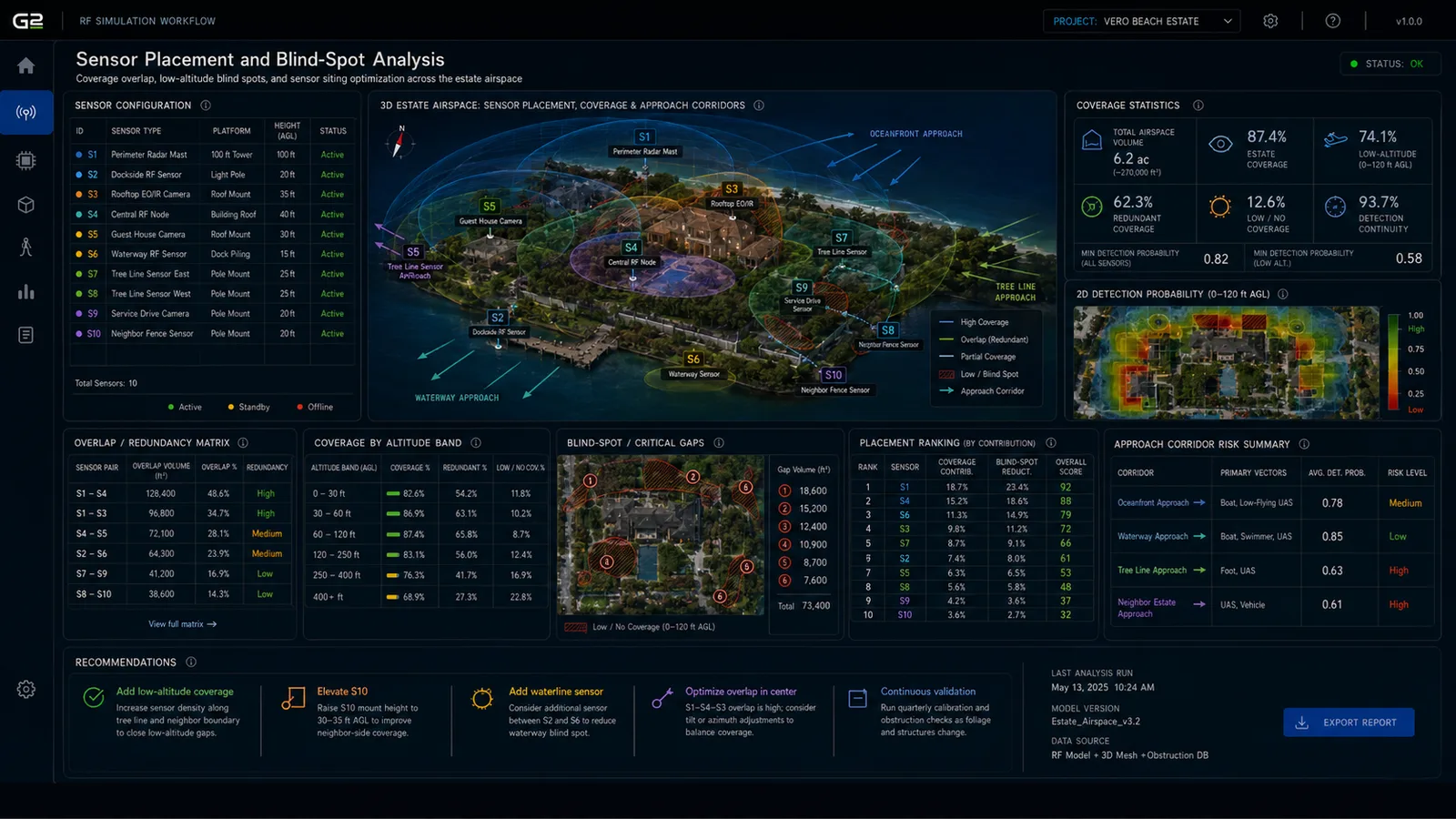
The operational environment is unusually complex. Dense landscaping, multi-structure layouts, dock infrastructure, guest houses, smart-home systems, perimeter lighting, neighboring estates, shoreline exposure, and low-altitude approach routes all shape what sensors can see and how reliably they can track a drone. A drone may approach from over the ocean, along a waterway, across neighboring properties, or through tree-lined corridors that shield it from direct visibility until it is already near the home.
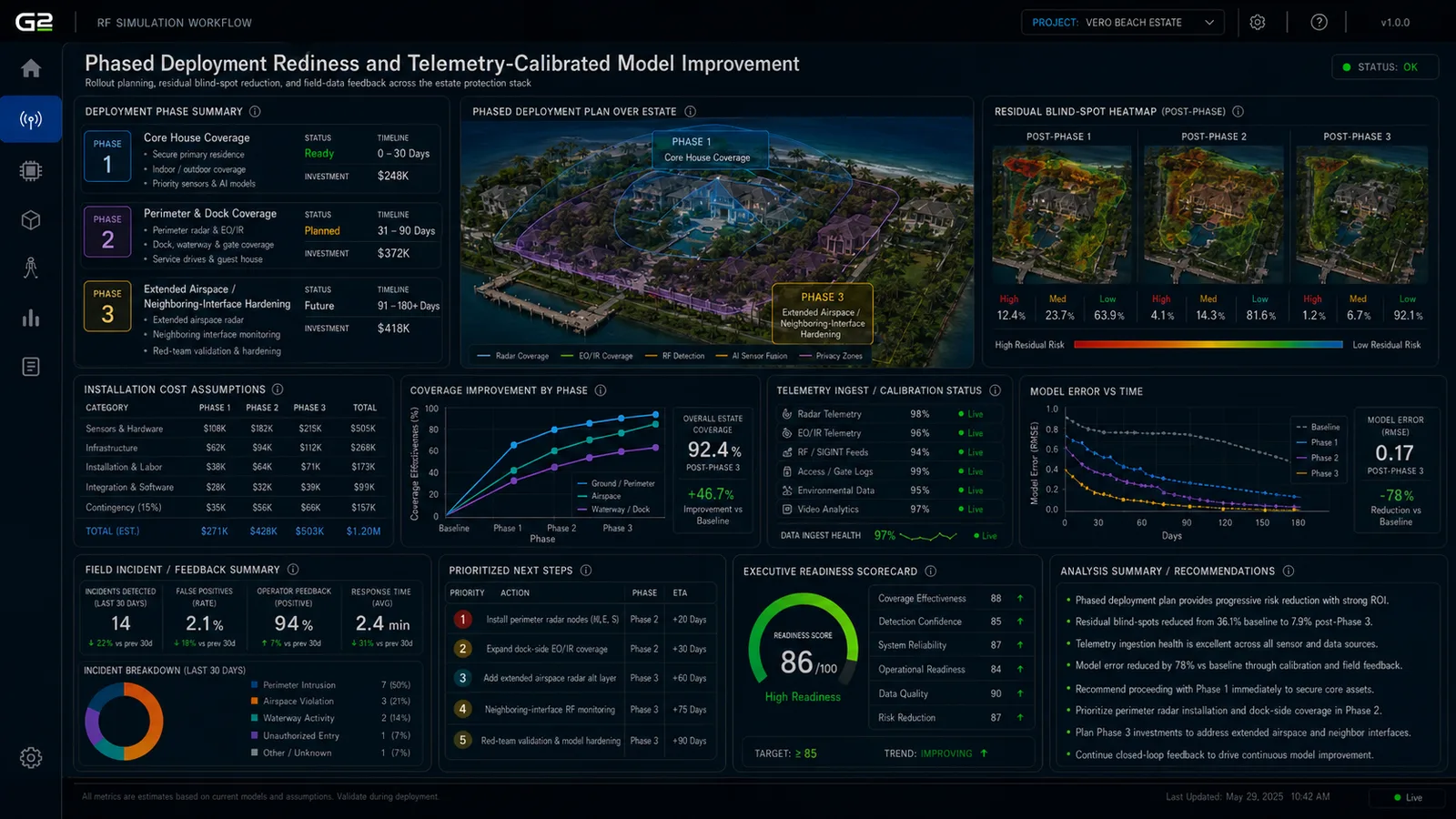
A useful simulation does more than produce a generic coverage map. It builds from physical estate geometry upward into the full operational airspace environment, evaluates how terrain, vegetation, structures, wireless infrastructure, and sensor placement interact, and shows how distributed sensors support continuous tracking, where blind spots remain, and how field telemetry can refine the model after deployment.