From physical scene to operational decision
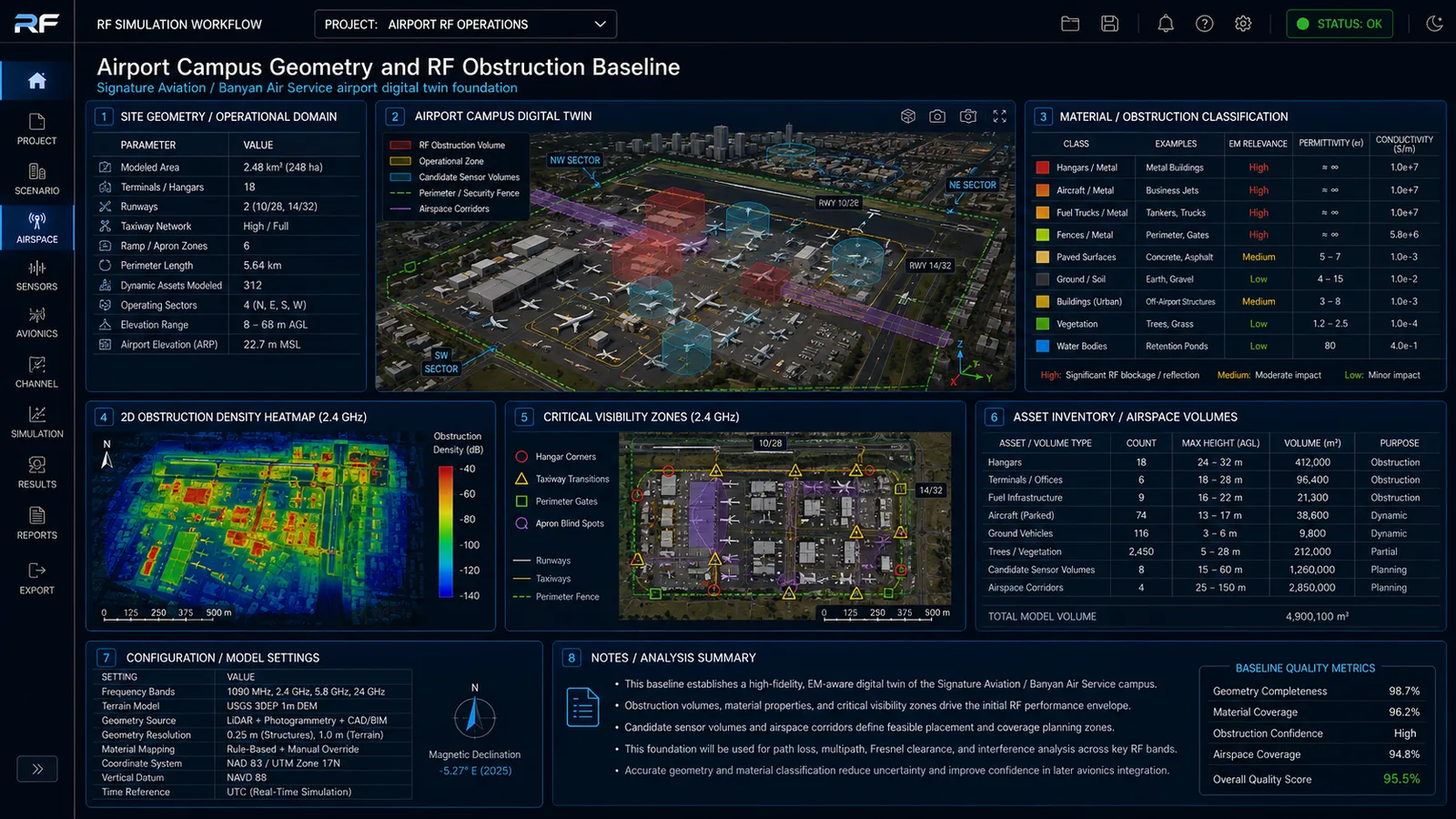
Airport RF environments are dynamic, congested, and highly dependent on operational context. Hangars, aircraft, ground vehicles, fuel operations, maintenance activity, nearby urban infrastructure, and airspace movement all influence detection coverage, communication reliability, and operational visibility.
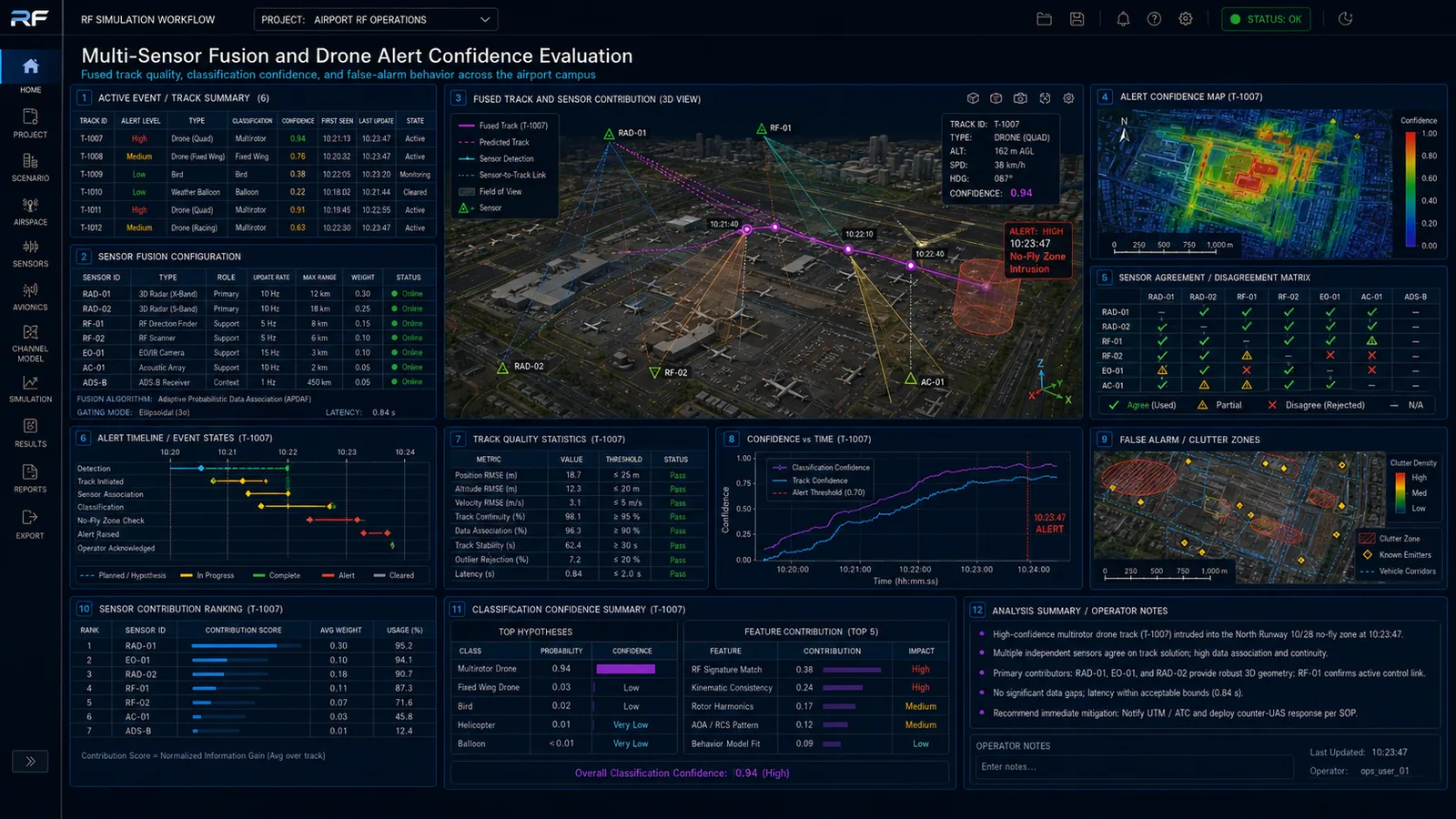
An antenna that performs well on a bench may behave differently mounted on an aircraft in a hangar. A sensor that covers its field of view in isolation may become blind during peak ramp operations. A coverage map produced without accounting for aircraft movement or urban interference may look complete and still miss the drone.
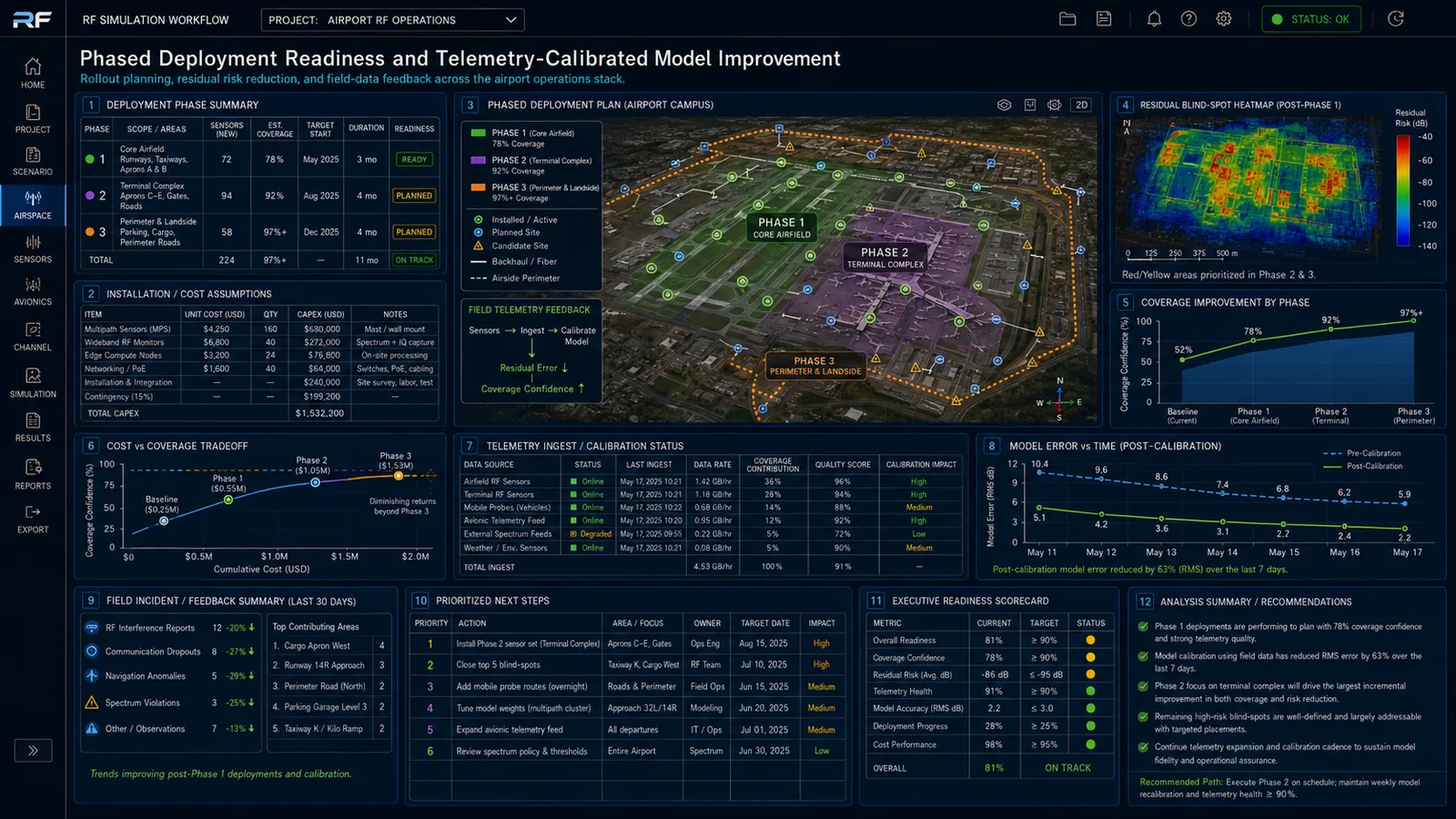
A layered simulation sequence matters here because airport performance failures rarely come from one isolated cause. Simulation that stops at any one of those layers produces a technically attractive but operationally misleading result.